Remote Handling Manipulator
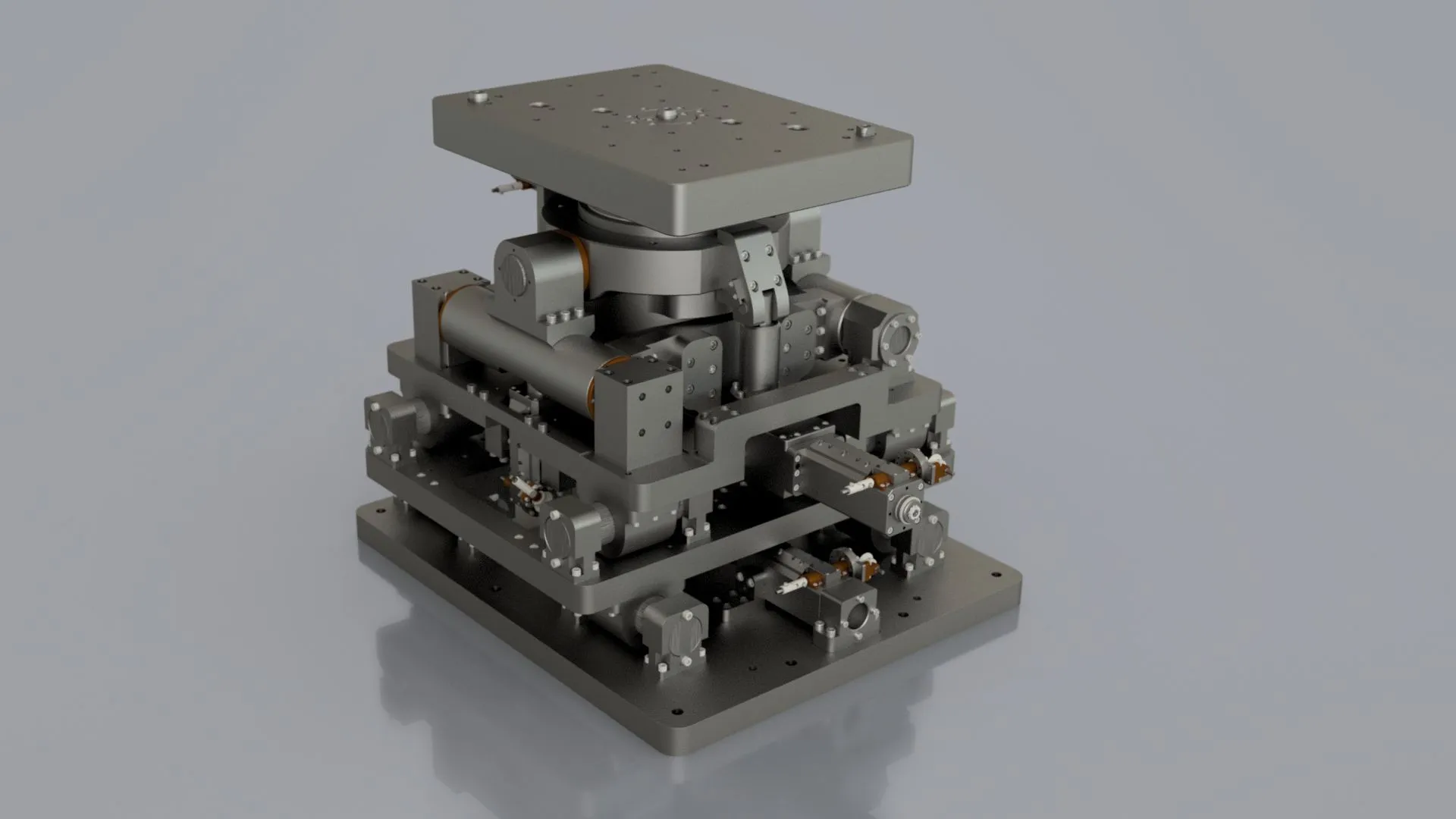
This remote handling manipulator is designed for the precise positioning of critical components within complex technical systems. Offering full control across three translational and three rotational axes, it enables accurate and reliable manipulation in environments where human presence poses a health or safety risk. Developed for high performance, the system achieves micron-level precision across all six degrees of freedom, ensuring safe, stable, and highly accurate operation even in the most demanding conditions.